Crashs vermeiden geht mit dem Lego Mindstorms Ultraschallsensor ganz einfach! Mit dem Ultraschallsensor wird ständig der Abstand gemessen und vor einem Zusammenstoß hält das Fahrzeug an.
Was brauchst du?
Hinweis
Wir nutzen in diesem Projekt die EV3-Classroom Software von Lego Education. Wenn du ein anderes Programm verwendest, um deinen Lego Roboter zu programmieren, können sich die Code-Blöcke leicht unterscheiden. Die grundsätzliche Herangehensweise bleibt aber gleich!
Schritt 1: Fahrzeug mit Ultraschallsensor bauen
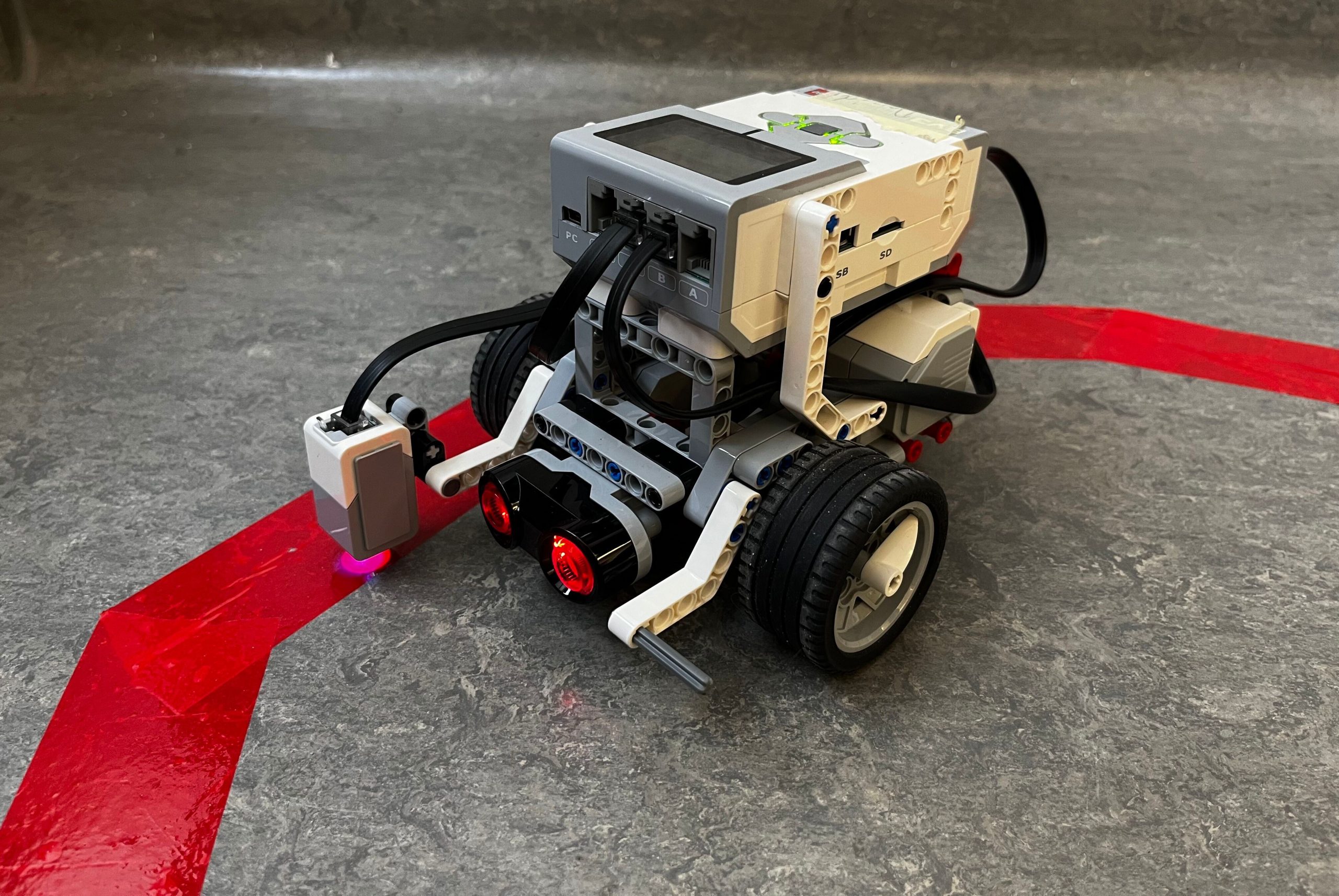
Zunächst einmal muss man ein Fahrzeug bauen. Dies kann das standardmäßige Lego-Fahrgestell sein oder eine Eigenkreation sein. Wichtig ist: Baue den Ultraschall-Sensor vorne an das Fahrzeug, damit der Abstand zu Hindernissen gemessen werden kann.
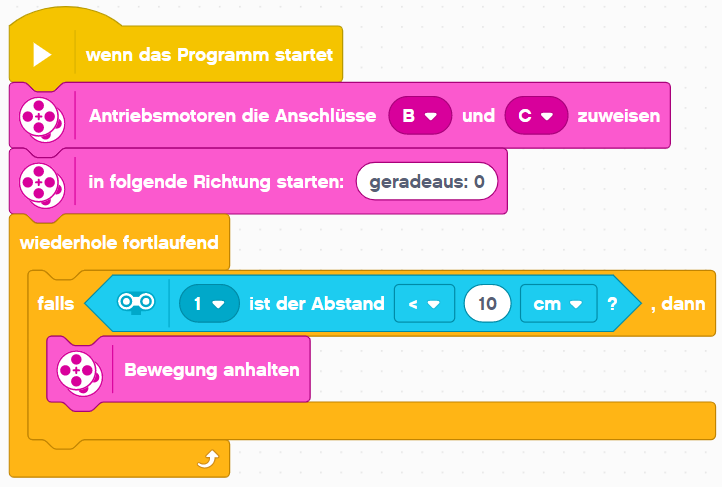
Schritt 2: Vor Hindernis anhalten
Nun wollen wir dafür sorgen, dass das Fahrzeug vor Hindernissen anhält und nicht einfach in sie hineinfährt.
Dafür überprüfen wir fortlaufend, ob der Abstand, den der Ultraschall-Sensor misst, kleiner als ein bestimmter Wert (z. B. 30 cm) ist. In diesem Fall soll nämlich die Bewegung angehalten werden und das Fahrzeug kommt zum Stillstand!
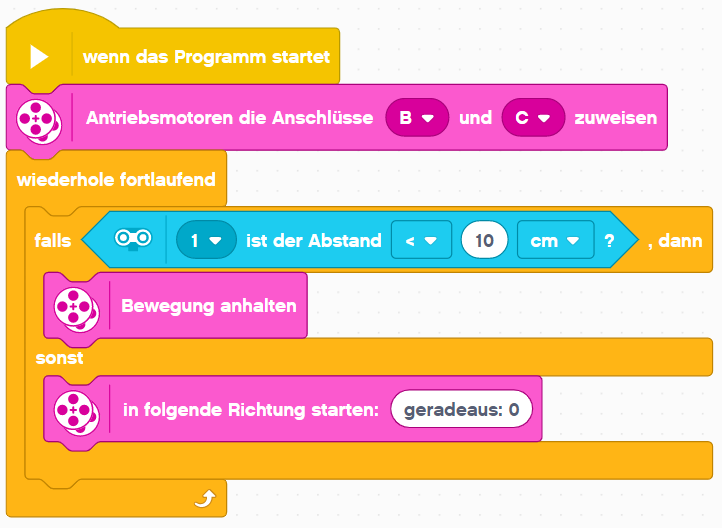
Schritt 3: Wenn das Hindernis verschwindet…
Nun möchten wir mehr! Was ist nämlich, wenn das Hindernis (z. B. ein Fuß) wieder verschwindet? In diesem Fall soll das Fahrzeug natürlich weiterfahren. Das tut es mit dem vorigen Code aber leider nicht.
Das Problem lässt sich leicht lösen: Mit der Falls-Dann-Klammer! Falls der Abstand kleiner als ein bestimmter Wert (z. B. 30 cm) ist, soll das Fahrzeug anhalten. In dem anderen Fall (sonst) soll es wieder geradeaus starten.
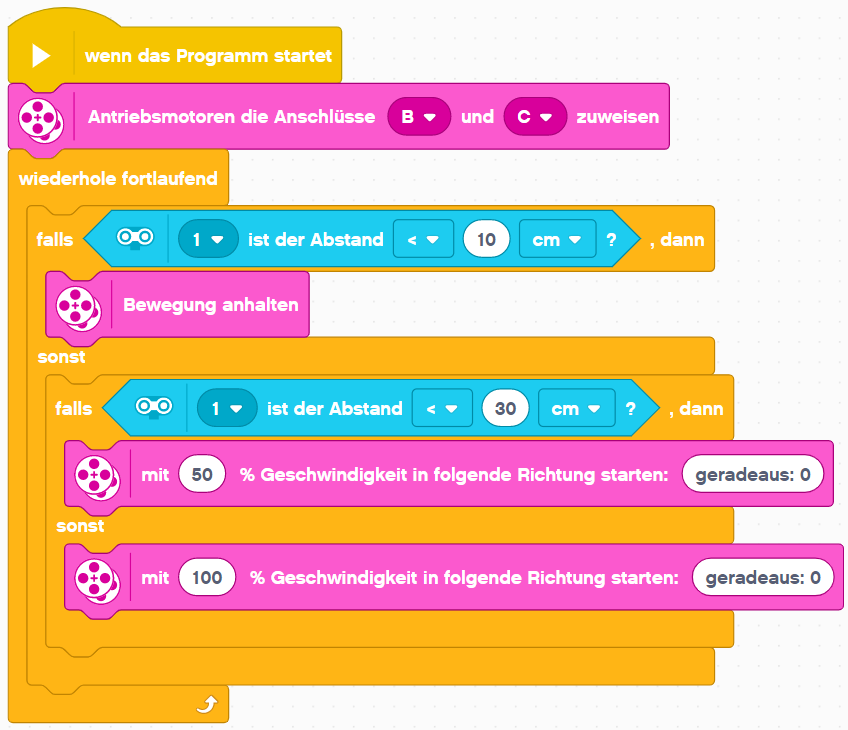
Schritt 4: Abruptes Anhalten vermeiden
Wir denken noch einen Schritt weiter! Bei autonomen Autos gibt es auch Abstands-Sensoren zur Crash-Vermeidung. Aber kein Auto wird einfach abrupt anhalten. Vielmehr wird das Fahrzeug schon bei größerem Abstand zunächst einmal langsamer werden und erst, wenn das Fahrzeug dicht dran ist, wird es ganz anhalten. Das wollen wir für das Lego-Fahrzeug auch umsetzen!
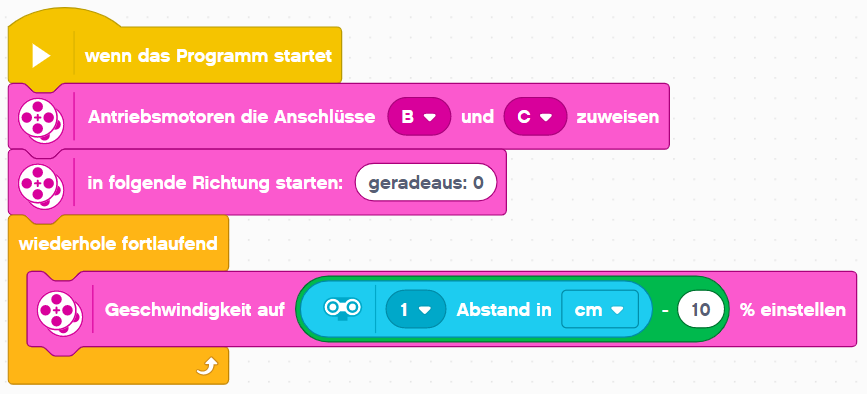
Schritt 5: Sanftes Brems-Manöver
Noch sanfter wird das Brems-Manöver, wenn das Fahrzeug von der ursprünglichen Geschwindigkeit in vielen kleinen Schritten langsamer wird. Die Geschwindigkeit wird also ständig an den Abstand angepasst.
Das klappt einfacher als gedacht! Wir lesen dafür einfach den gemessenen Abstand des Ultraschall-Sensors ein und ziehen 10 davon ab. Das Ergebnis wird zur Geschwindigkeit des Fahrzeugs! Auf diese Weise bleibt das Fahrzeug beim Abstand 10 cm stehen, denn 10 – 10 = 0. Bei einem Abstand von 60 cm, hat das Fahrzeug noch die halbe Maximalgeschwindigkeit, denn 60 – 10 = 50.
Ist einem der Abbrems-Prozess zu schnell oder zu langsam, lässt sich dieser mit den mathematischen Operatoren noch verändern.
Fazit
Mit dem Lego Mindstorms Roboter Ultraschallsensor kann man sich einfach Crashs vermeiden und einen großen Schritt in Richtung autonomes Fahren tun! Der Ultraschallsensor kann aber auch noch viel mehr, deiner Kreativität sind keine Grenzen gesetzt!
Du findest hier im Blog weitere spannende Lego Mindstorms Robotik-Projekte!